|
| 15 APPUNTI SULLA STABILITA’ DEL DELTAPLANO E DEL PARAPENDIO
Premessa
La stabilità di un corpo o di un sistema dotati di una certa massa è determinata dalla loro capacità di ritornare alla posizione iniziale quando qualcosa sia intervenuto a spostarli da quella iniziale di quiete. Questo è un concetto molto generale che deve essere approfondito caso per caso con riferimento alla stabilità di diversi corpi o sistemi. La stabilità è strettamente connessa all’equilibrio che come sappiamo può essere per definizione stabile, indifferente o instabile. Il concetto di stabilità richiama quello di neutralità (equilibrio indifferente) e di instabilità (equilibrio instabile). Si definiscono dotati di stabilità neutrale o meglio di equilibrio indifferente un corpo o un sistema dotato di una certa massa che spostati dalla loro posizione iniziale di quiete si arrestano nella nuova posizione assunta al cessare dell’azione che ne ha determinato lo spostamento. Mentre risultano instabili o dotati di equilibrio instabile un corpo o un sistema dotati di una certa massa che spostati dalla loro posizione iniziale di quiete tendono ad allontanarsene ancor più al cessare dell’azione che ne ha determinato lo spostamento. Lo stesso corpo o sistema può essere dotato di diverse caratteristiche di equilibrio a seconda di come risulta posizionato e dipendentemente dalla forma della superficie su cui è adagiato. Così una sfera di acciaio si dice dotata di equilibrio stabile se adagiata su una superficie concava, dotata di equilibrio indifferente se adagiata su una superficie piana, di equilibrio instabile se adagiata su una superficie convessa.
Così definite stabilità, neutralità ed instabilità sono caratteristiche che vengono prese in considerazione dallo studio della statica. Quando invece consideriamo la stabilità, la neutralità o l’instabilità di corpi o sistemi in movimento allora dovremo fare riferimento non già alla posizione iniziale ed a quella finale che essi assumono al cessare dell’azione di forze ad essi applicate, ma bensì alle condizioni di moto (velocità, direzione della traiettoria e verso su di essa) iniziali e finali. Di conseguenza più che parlare di equilibrio stabile, di equilibrio indifferente o di equilibrio instabile dovremo parlare di comportamento stabile, comportamento neutro o instabile di un corpo o di un sistema in movimento. I concetti non cambiano ma cambiano i criteri di valutazione che si debbono applicare per definire tali comportamenti in relazione alla stabilità. Venendo in breve al volo e con riferimento ai sistemi ala-pilota che siamo soliti utilizzare, cioè il deltaplano ed il parapendio potremo dire che essi sono dotati di caratteristiche di stabilità (o di neutralità o di instabilità) che solo in parte sono attribuibili alle loro caratteristiche aerodinamiche e che per il resto sono attribuibili o a particolari accorgimenti costruttivi o alla pendolarità tipica di questi sistemi o all’insieme di tutte queste cose. Vediamo di seguito nel dettaglio di definire le caratteristiche comportamentali del deltaplano e del parapendio in relazione alla stabilità rispetto ai loro tre assi di rotazione, quello verticale, quello trasversale e quello longitudinale.
Deltaplano
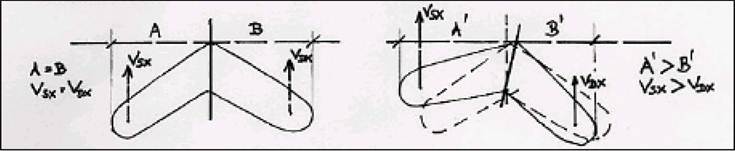
In volo il deltaplano è dotato di un comportamento stabile rispetto all’asse verticale a causa della sua forma a freccia determinata dall’angolo di naso formato dalle due semiali. Immaginiamo che l’applicazione temporanea di una forza determini una rotazione del delta attorno all’asse verticale facendolo imbardare. Durante l’imbardata la seminala che avanza sarà dotata, per il transiente di tempo necessario alla rotazione, di velocità all’aria maggiore e produrrà per questo una resistenza aerodinamica maggiore. Inoltre durante l’avanzamento la stessa semiala presenterà al flusso d’aria una sezione frontale via via maggiore determinando un aumento della resistenza di forma. Esattamente il contrario avverrà per la seminala che durante l’imbardata arretra. Al cessare dell’azione della forza che ha causato l’imbardata, per effetto dello sbilanciamento dei valori di resistenza prodotta dalle due semiali, dovuto a quanto or ora detto, il delta tenderà a ritornare alle condizioni di volo iniziali con una contro-imbardata tanto più senza oscillazioni quanto più il delta è stato progettato per smorzarle. Presentando cioè un comportamento stabile rispetto all’asse verticale. Osservando la figura 1 la comprensione di tutto quanto sopra descritto risulta più immediata e facile.
(Figura 1)
In condizioni di equilibrio la velocit� all�aria della semiala destra Vdx corrisponde a quella della seminala sinistra Vsx ed a quella all�aria del delta Va. Durante l�imbardata la velocit� della seminala sinistra Vsx aumenta per un transiente di tempo per effetto della rotazione divenendo temporaneamente maggiore di Va e di Vdx. Durante la rotazione ed al termine della stessa come ben si pu� notare A� va divenendo via via maggiore di B� sino a rotazione cessata per effetto della forma "a freccia" del delta. Il deltaplano in volo presenta un comportamento stabile rispetto all�asse longitudinale o di rollio. Ci� � dovuto al diedro alare positivo di cui � dotato. Per effetto di tale diedro, che consiste nel fatto che le due estremit� alari in volo livellato giacciono su un piano pi� alto di quello su cui giace la chiglia, se una forza determina un movimento di rollio la superficie proiettata della seminala che si abbassa aumenta mentre il contrario avviene per la seminala che si solleva. Ricordando che la portanza alare � proporzionale alla superficie proiettata dell�ala (e ugualmente di ciascuna seminala) si determiner� un aumento di portanza sulla seminala che si abbassa ed una diminuzione della stessa sulla seminala che si solleva. Il disequilibrio dei due valori di portanza determiner� un ritorno alle condizioni iniziali di equilibrio determinando un abbassamento della seminala sollevata ed sollevamento della seminala abbassata, anche in questo caso tanto pi� senza oscillazioni quanto pi� il delta � stato progettato per smorzarle. Presentando cos� il delta un comportamento stabile attorno all�asse longitudinale. In figura 2 viene graficamente illustrato quanto sopra descritto.
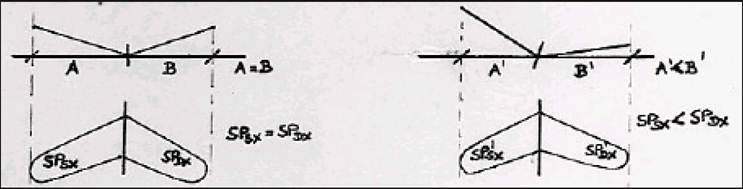
In condizioni di equilibrio la velocità all’aria della semiala destra Vdx corrisponde a quella della seminala sinistra Vsx ed a quella all’aria del delta Va. Durante l’imbardata la velocità della seminala sinistra Vsx aumenta per un transiente di tempo per effetto della rotazione divenendo temporaneamente maggiore di Va e di Vdx. Durante la rotazione ed al termine della stessa come ben si può notare A’ va divenendo via via maggiore di B’ sino a rotazione cessata per effetto della forma "a freccia" del delta. Il deltaplano in volo presenta un comportamento stabile rispetto all’asse longitudinale o di rollio. Ciò è dovuto al diedro alare positivo di cui è dotato. Per effetto di tale diedro, che consiste nel fatto che le due estremità alari in volo livellato giacciono su un piano più alto di quello su cui giace la chiglia, se una forza determina un movimento di rollio la superficie proiettata della seminala che si abbassa aumenta mentre il contrario avviene per la seminala che si solleva. Ricordando che la portanza alare è proporzionale alla superficie proiettata dell’ala (e ugualmente di ciascuna seminala) si determinerà un aumento di portanza sulla seminala che si abbassa ed una diminuzione della stessa sulla seminala che si solleva. Il disequilibrio dei due valori di portanza determinerà un ritorno alle condizioni iniziali di equilibrio determinando un abbassamento della seminala sollevata ed sollevamento della seminala abbassata, anche in questo caso tanto più senza oscillazioni quanto più il delta è stato progettato per smorzarle. Presentando così il delta un comportamento stabile attorno all’asse longitudinale. In figura 2 viene graficamente illustrato quanto sopra descritto.
(Figura 2)
Si può osservare di fronte ed in pianta come ad un movimento di rollio corrispondano rispettivamente un aumento ed una diminuzione di superficie proiettata delle due semiali. Il disegno in pianta permette di apprezzare visivamente la differenza di superficie proiettata esistente tra le due semiali a seguito del movimento di rollio del delta e della presenza del diedro alare di cui è dotato. Rispetto al volo con ali livellate in cui SPdx è uguale ad SPsx si può notare come invece per effetto del rollio SPdx risulti maggiore di SPsx confermando quanto sopra esposto. Alla stabilità in rollio del delta contribuisce altresì la pendolarità del sistema alapilota, supponendo che quest’ultimo risulti solidale con l’ala per il fatto che impugna la barra. In questo caso infatti lo spostamento laterale del baricentro del pilota rispetto all’asse longitudinale di rotazione dell’ala crea un momento determinato dalla forza peso del pilota stesso capace di indurre un movimento di ritorno del sistema alla condizione iniziale (ali livellate ad esempio). Nota: in tutto quanto descritto non si è tenuto conto del fatto che le variazioni di superficie proiettata indotte dal rollio determinano non solo una variazione di portanza delle due semiali ma altresì una variazione di resistenza prodotta dalle due. Ne consegue che si potrà originare anche un moto spontaneo di imbardata conseguente al rollio. E’ la bontà del progetto che, dotando il delta di un’ottima stabilità in imbardata e di una altrettanto buona stabilità in rollio, farà si che non si inneschino oscillazioni contemporanee sui due assi (Dutch Roll) o si smorzino immediatamente. Una constatazione del tutto simile a quella or ora fatta, ma relativa all’aumento ed alla diminuzione di portanza sulle due semiali che consegue ad un movimento di imbardata, ci induce alle medesime considerazioni. Anche in questo caso infatti se non intervenisse e se non fosse in stretta connessione la stabilità sull’asse verticale con quella sull’asse longitudinale si potrebbero verificare oscillazioni contemporanee e conseguente dutch roll. La scelta dell’angolo di naso, dell’entità del diedro alare, della geometria dell’ala in generale e del tipo di profilo alare debbono tra loro rappresentare un ottimo compromesso finalizzato non solo all’ottimizzazione delle prestazioni, della manovrabilità e della maneggevolezza di un delta, ma anche e soprattutto per incrementarne la stabilità. Il deltaplano presenta anche e soprattutto un comportamento stabile rispetto ai movimenti attorno all’asse trasversale. E’ cioè dotato di stabilità longitudinale.
Ciò è sostanzialmente dovuto a quattro diversi fattori ed elementi costruttivi:
consistente se non totale perdita di portanza della sua parte posteriore centrale; venendosi così a determinare un accentuato spostamento in avanti del centro di pressione capace di portare l’ala a cabrare aiutando eventuali manovre del pilota a ciò indirizzate.
Possiamo dire che ai fini della stabilità longitudinale del deltaplano ciò che è descritto nei primi tre punti contribuisce a garantirla ad angoli di incidenza ed assetti normali di volo, meglio dire a regimi di volo normali. Mentre ciò che è descritto al quarto punto risulta indispensabile per garantire al deltaplano di conservare stabilità longitudinale e possibilità di manovra a bassissimi valori di incidenza, a valori di assetto molto negativi (traiettorie che si avvicinano a quelle verticali) nell’insieme cioè in situazioni di volo caratterizzate da regimi di velocità elevatissima. Analizziamo come contribuiscono ad uno ad uno gli elementi elencati. Il primo di essi è lo svergolamento simmetrico delle semiali che provvede a far volare ad ogni regime le estremità alari con minore incidenza rispetto alla parte centrale dell’ala stessa. Ciò consente che al variare dell’assetto per effetto dell’applicazione di una forza capace di imporre un movimento di picchiata o di cabrata rispettivamente la "deportanza" o l’aumentata portanza delle estremità alari che si viene a creare rispetto a quanto avviene al centro dell’ala induce un momento cabrante o picchiante capace di fornire al delta una certa stabilità attorno all’asse trasversale. Ovviamente questo effetto è possibile e si spiega osservando che per effetto della freccia alare le estremità alari del delta sono arretrate rispetto alla sezione centrale dell’ala. In assenza di freccia la stabilità dovuta allo svergolamento produrrebbe ugualmente gli stessi effetti sui valori di portanza prodotta dalle estremità alari durante o a seguito di una picchiata o cabrata, ma non si potrebbe disporre di momenti stabilizzanti. Tali momenti sono possibili solo se si verifica la presenza contemporanea di forze e di "bracci", in questo caso identificabili con i segmenti di retta, paralleli all’asse longitudinale, che rappresentano la dislocazione all’indietro delle estremità alari rispetto alla sezione centrale dell’ala. Un effetto stabilizzante rispetto all’asse trasversale è altresì fornito dal fatto che per la natura dei profili utilizzati a qualsiasi cabrata corrisponde un arretramento del centro di pressione o di spinta capace di indurre un momento picchiante ed una conseguente rotazione attorno all’asse trasversale, mentre il contrario avviene a seguito di una qualsiasi picchiata. Si è visto al punto 3) che anche lo spostamento del baricentro del pilota che impugna la barra del trapezio determina una pendolarità del sistema che contribuisce a riportare il delta alle condizioni originali di volo. Si pensi che se in una cabrata improvvisa e non comandata il baricentro del pilota, che rimane solidale con il delta impugnando la barra, si sposta in avanti esattamente come in un pendolo si crea un momento idoneo ad indurre un momento picchiante. La rappresentazione grafica dello svergolamento e di come esso può determinare stabilità, unitamente allo spostamento del centro di pressione a seguito di picchiate e cabrate è complessa e difficilmente riproducibile in una figura. Ancor più complesso e meno intuibile risulterebbe rappresentare graficamente i tre effetti combinati di cui sopra. Utilizziamo invece della grafica una esemplificazione per fasi di come intervengono i fenomeni sopra descritti nel senso di conferire unitamente stabilità longitudinale al deltaplano:
Il baricentro del pilota che è solidale all’ala attraverso l’impugnatura della barra, si sposta in avanti e per l’effetto pendolo crea un momento atto a riportare il sistema ala-pilota alle condizioni iniziali Non vi sono dubbi che si può definire il deltaplano così concepito una macchia stabile rispetto ai movimenti di rotazione attorno all’asse trasversale e cioè in beccheggio. Vediamo ora sinteticamente come intervengono gli elementi stabilizzanti di cui è dotato il delta in caso di picchiate di grande entità indotte da cause esterne o volute dal pilota. Anzitutto diciamo che se le velocità eccedono quelle d’uso previste (angoli di incidenza minimi) potrebbero verificarsi pericolose deformazioni del profilo e della struttura. Ad evitare ciò provvedono principalmente sprog o cavi antidrappo istallati opportunamente. Principalmente però sia gli sprog, sia i cavi antidrappo ancorati sulla parte posteriore della sezione centrale dell’ala, sia i tips alari intervengono producendo un sollevamento del terzo posteriore dell’ala capace di inibire la creazione di portanza da parte di questa porzione di profilo. Ne consegue una riduzione generale dei valori di portanza prodotti dall’ala intera, ma anche e soprattutto un brusco ed ampio spostamento in avanti del centro di pressione. Ciò consente di creare un notevole momento cabrante che determina un’uscita dalla configurazione e comunque facilita enormemente la manovra che il pilota deve eseguire per riprendere a volare su traiettorie meno ripide ed a regimi di volo più normali. Oltre a questo decremento di portanza della porzione posteriore della sezione centrale dell’ala, che può addirittura trasformarsi al limite in deportanza (portanza negativa) l’intervento dei dispositivi in questione determina il sollevarsi del bordo d’uscita dando luogo alla "realizzazione" di una deformazione che si può assimilare ad un "elevatore o piano di coda" posizionato a cabrare per similitudine con gli aeromobili convenzionali. Anche questo generando notevole resistenza contribuisce a rallentare il sistema ma soprattutto induce un momento cabrante al deltaplano (la resistenza aerodinamica generata da questo "piano di coda" così posizionato tende a far ruotare il deltaplano verso una posizione più cabrata).
Parapendio
Il parapendio ha una stabilità principalmente pendolare pur rimanendo valido anche per esso quanto già detto per il deltaplano pur facendo le dovute distinzioni e precisazioni e prescindendo da alcune caratteristiche del deltaplano che sono attribuibile ad alcuni suoi tipici elementi costruttivi.
1 - Stabilità del parapendio in imbardata
La stabilità in imbardata del parapendio è determinata dalla sua forma generalmente ellittica più o meno pronunciata e dalla sua campanatura (inarcamento visto di fronte). La forma ellittica dà al parapendio le caratteristiche di un’ala a freccia anche se il bordo d’attacco non è rappresentato da una linea retta o segmenti di linee rette. Esiste comunque la possibilità, guardando l’ala in pianta, di individuarne una forma a freccia se si immagina di tracciare le tangenti al bordo d’attacco nei punti mediani di ciascuna seminala. Trattandosi di un’ala freccia con un certo angolo di freccia in caso di imbardata indotta per una qualche ragione, la seminala che avanza ruotando genererà più resistenza per la sua temporanea aumentata velocità e per l’aumentata dimensione lineare del bordo di entrata che si presenta al flusso. Mentre il contrario avviene per la semiala che ruotando arretra. Lo sbilanciamento dei valori di resistenza sulle due semiali induce un momento di rotazione attorno all’asse verticale che riporta l’ala alle condizioni iniziali. Il parallelo e conseguente aumento contemporaneo di portanza sulla seminala che avanza e la corrispettiva diminuzione della stessa sulla seminala che arretra avrebbero un effetto solo sa la causa dell’imbardata non cessasse in breve tempo. Se invece la causa viene a cessare in breve l’accentuata pendolarità del sistema provvede ad attutire gli effetti dello sbilanciamento dei valori di portanza sulle due semiali non consentendo al sistema di assumere angoli di rollio. Ciò accadeva a detrimento della stabilità del parapendio quando le ali erano poco allungate ed il fascio funicolare di altezza ridotta quindi quando in sostanza la pendolarità del sistema era assai ridotta rispetto ai giorni nostri. L’effetto stabilizzante della campanatura di cui si è parlato, pur essendo minimo e quasi insignificante, va pur citato e si può analizzare facendo mente locale al fatto che essa determina un posizionamento delle estremità alari su piani abbastanza complanari a quello verticale. Si ricordino gli "stabilo" delle vecchie ali che avevano il compito di rendere stabili attorno all’asse di imbardata ali la cui forma più che ellittica era rettangolare. Forse aumentavano la possibilità di volare in linea retta più che non determinare una vera e propria stabilità in imbardata, ma
comunque assolvevano non male il proprio compito. Con riferimento ad essi si comprende come possa influire sulla stabilità una conformazione dell’ala che consente alle estremità alari di giacere su piani molti inclinati ed a volte anche quasi paralleli a quello verticale (campanatura accentuata).
2 - Stabilità del parapendio in beccheggio
I profili alari adottati nel parapendio sono di tipo tale che il centro di pressione o di spinta varia al variare dell’angolo di incidenza. Come già detto per il deltaplano esso in sintesi arretra in caso di cabrata ed avanza in caso di picchiata. Tutto ciò crea momenti stabilizzanti che tendono ad opporsi al movimento indotto sull’ala. E questa è l’effetto aerodinamico che produce stabilità del parapendio. Ma l’entità di tale effetto è se vogliamo effimera se paragonata a quella prodotta dalla pendolarità del sistema. Quest’ultima garantisce un’ottima stabilità longitudinale al parapendio, ma attenzione!! Da sola, questa pendolarità porterebbe sì il sistema ad essere stabile ma con la prerogativa che il ritorno alla posizione iniziale avverrebbe con un certo numero di oscillazioni. Il combinarsi della stabilità aerodinamica in beccheggio di cui sopra, dell’incurvamento del profilo dell’ala che il progettista decide di adottare e la scelta del profilo corrispondente di ogni sezione alare determinano nel parapendio una sua caratteristica e peculiare capacità di smorzare le oscillazioni, e questo è parte integrante della sua stabilità non solo in beccheggio ma anche in rollio.
3 - Stabilità in rollio
La stabilità in rollio od attorno all’asse longitudinale del parapendio non deriva certo dal suo diedro alare in quanto essendo esso negativo, produrrebbe di per sé instabilità e divergenza e non già stabilità. La stabilità attorno all’asse longitudinale od in rollio del parapendio è esclusivamente di tipo pendolare e quindi funzione di alcuni suoi parametri geometrici tra cui il principale è l’altezza del fascio funicolare. L’effetto della pendolarità è passibile di indurre però oscillazioni (il pendolo per antonomasia è qualcosa che oscilla) che in qualche modo il progettista deve prevedere di rendere smorzate. In effetti ciò viene realizzato mediante la scelta delle caratteristiche geometriche dell’ala ed un opportuno compromesso tra di esse. |